Quels sont les 3 modes de fonctionnement d’un régulateur PID ?
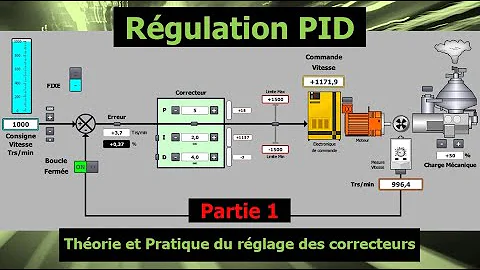
La régulation PID combine les actions proportionnelle, intégrale et dérivée pour générer un seul signal de commande, où chaque action offre une caractéristique permettant de réguler la sortie.
Quels sont les types de régulation ?
Principes de régulation : P – PI – PID
- La régulation par “tout ou rien” ou “On-Off”
- La régulation Proportionnelle (P)
- La régulation Proportionnelle – Intégrale (PI)
- La régulation Proportionnelle – Intégrale – Dérivée (PID)
Quels sont les 3 critères de réglage d’un asservissement ?
□ Assure la rapidité
Les indicateurs d'un bon réglage du système asservi sont ceux qui doivent satisfaire les critères de stabilité, de précision, de rapidité, et d'amortissement.
Quels sont les PID ?
Un régulateur PID (Proportionnel Intégral Dérivé) est un organe de contrôle permettant d'effectuer une régulation en boucle fermée d'un système automatique. C'est le type de régulateur le plus utilisé dans l'industrie et qui permet de contrôler un grand nombre de procédés.
Comment faire une régulation PID ?
Comment régler les coefficients d'un PID ?
- Tout d'abord, il faut mettre en place un simple régulateur proportionnel (les coefficients Ki et Kd sont donc nuls). …
- Une fois ce coefficient réglé, on peut passer au coefficient Ki. …
- Enfin, on peut passer au dernier coefficient Kd qui permet de rendre le système plus stable.
Comment fonctionne le PID ?
La régulation PID combine les actions proportionnelle, intégrale et dérivée pour générer un seul signal de commande, où chaque action offre une caractéristique permettant de réguler la sortie.
Qu’est-ce que ça veut dire PID ?
Étymologie. Emprunté à l'anglais PID , initiales de process identifier (« identifiant de processus »).
Quelle est l’utilité d’une boucle fermée ?
De manière générale, une boucle de régulation fermée sert à amener une grandeur physique donnée (grandeur de régulation r) à une valeur souhaitée (valeur de consigne s) et à la maintenir à cette valeur grâce à la mesure et à la régulation de la valeur effective i.
Comment fonctionne un PID ?
La régulation PID combine les actions proportionnelle, intégrale et dérivée pour générer un seul signal de commande, où chaque action offre une caractéristique permettant de réguler la sortie.
Qu’est-ce q’un PID ?
Le régulateur PID, appelé aussi correcteur PID (proportionnel, intégral, dérivé) est un système de contrôle permettant d'améliorer les performances d'un asservissement, c'est-à-dire un système ou procédé en boucle fermée.
Quels sont les deux types d’un régulateur ?
Il existe trois types de régulateurs de température : on/off, proportionnel et PID. Les opérateurs sont les principaux utilisateurs de ces régulateurs pour contrôler le processus. Pour vous aider à mieux comprendre le sujet, parlons des trois types de régulateur.
Quelles sont les 2 types de structure permettant de faire une boucle ?
En résumé
- Les boucles sont des structures qui nous permettent de répéter une série d'instructions plusieurs fois.
- Il existe plusieurs types de boucles : while , do… while et for . …
- for est probablement celle qu'on utilise le plus. On y fait très souvent des incrémentations ou des décrémentations de variables.
Quelle est la différence entre une boucle ouverte et une boucle fermée ?
En effet, un système en boucle ouverte ne peut pas corriger les erreurs qu'il commet ou corriger les perturbations extérieures. L'opposé du contrôle en boucle ouverte est le contrôle en boucle fermée, qui lui intègre la rétroaction du système qui est en général négative (contre-réaction).
Pourquoi utiliser un PID ?
Le régulateur PID, appelé aussi correcteur PID (proportionnel, intégral, dérivé) est un système de contrôle permettant d'améliorer les performances d'un asservissement, c'est-à-dire un système ou procédé en boucle fermée.
Comment marche le régulateur ?
Le conducteur fixe ou programme la vitesse souhaitée via une commande du régulateur. Ce dernier prend le relais de manière automatique pour maintenir une vitesse de croisière constante tout au long du voyage – sans intervention du conducteur sur la pédale d'accélération.
Quand on utilise Do While ?
L'instruction do… while crée une boucle qui exécute une instruction jusqu'à ce qu'une condition de test ne soit plus vérifiée. La condition est testée après que l'instruction soit exécutée, le bloc d'instructions défini dans la boucle est donc exécuté au moins une fois.
Quels sont les 3 types de boucles en Pseudo-langage ?
Les boucles en pseudo-code : répéter des blocs d'instructions
- Boucle : permet de répéter des blocs d'instructions.
- 3 boucles : …
- Condition de « bouclage » : c'est la condition qui permet à une boucle de continuer d'itérer.
- Condition d'arrêt : la condition d'arrêt est l'inverse de la condition de « bouclage ».
Quel est le but d’une boucle ?
- Une boucle est un moyen de répéter des instructions suivant le résultat d'une condition.
Quelle est la différence entre un régulateur et un limiteur ?
En effet, comme leur nom l'indique, le limiteur de vitesse limite la vélocité du véhicule, il impose une barrière que le véhicule ne peut pas dépasser. Le régulateur de vitesse, quant à lui, régule la vélocité du véhicule.
C’est quoi le régulateur adaptatif ?
- Le régulateur adaptatif de vitesse et de distance (ACC – Adaptive Cruise Control) aide le conducteur à maintenir une vitesse constante et une distance de sécurité au véhicule qui précède. Il se compose d'un régulateur de vitesse et d'un dispositif de maintien de la distance.
Quelle est la différence entre while et do while ?
La boucle do while fonctionne comme la boucle while , à un petit détail près : elle s'exécutera toujours au moins une fois, alors qu'une boucle while peut ne pas s'exécuter si la condition est fausse dès le départ.
Quelle est la différence entre un test et une boucle ?
Les tests permettent de n'exécuter qu'une partie des instructions, en fonction des valeurs que prennent certaines variables, et les boucles de répéter certaines instructions. On rappelle que des instructions forment un bloc si elles sont comprises entre deux accolades.
Quelle est la différence entre limiteur et régulateur ?
La principale différence vient de l'attitude de chacun de ces systèmes face à la vitesse. En effet, comme leur nom l'indique, le limiteur de vitesse limite la vélocité du véhicule, il impose une barrière que le véhicule ne peut pas dépasser. Le régulateur de vitesse, quant à lui, régule la vélocité du véhicule.
Quand on utilise la boucle for ?
Quand on sait combien de fois doit avoir lieu la répétition, on utilise généralement une boucle for . Si on ne connait pas à l'avance le nombre de répétitions, on choisit une boucle while .
Quand on utilise la boucle pour ?
Si l'on sait à l'avance le nombre de fois que le bloc d'instruction doit être exécuté, on utilise la boucle "Pour ….Allant de …. A…" Dans le cas contraire on utilise plutôt une boucle du type " Tant Que…. Faire".
Quelle sont les types de test ?
Les différents types de tests
- Tests unitaires. Les tests unitaires sont de très bas niveau, près de la source de votre application. …
- Tests d'intégration. …
- Tests fonctionnels. …
- Tests de bout en bout. …
- Tests d'acceptation. …
- Tests de performance. …
- Smoke tests.